Строим ракету-носитель — руководство
Содержание:
- Много или мало?
- Продольная и параллельная компоновка. Несъедобная спаржа.
- Range calculation
- Обтекатели, нужны или нет?
- Месторасположение
- Signal strength
- Орбиты в файлах сохранений
- Шаг 4 — Посадка на Муну
- Управление роверами
- Перечень командных модулей
- Использование
- Этапы
- Теория
- Создание планетоходов
- Effects of signal loss
Много или мало?
Руководство для родителей о том, что в этой игре.
Образовательная ценность
Игроки выбирают части ракетного корабля, собирают их в ангаре, а затем запускают свои ракеты, чтобы посмотреть, как они работают. Дети могут ставить перед собой конкретные цели, например, выйти на орбиту или достичь Луны. В основе этапов строительства и полета лежит надежная симуляция, которая использует астродинамику и физику, и игроки, которые находят время, чтобы наблюдать за показаниями полета и использовать предоставленные элементы управления, чтобы влиять на траекторию корабля, изучат основы ракетостроения и реалистичные, современные- дневной космический полет.
Положительные сообщения
Поощряет решение проблем, настойчивость в построении, тестировании.
Позитивные ролевые модели и представления
Корабли игроков укомплектованы отважными космонавтами.
Легкость игры
Легко играть с ракетами, но более сложные миссии могут быть очень сложными, если вы сначала не посмотрите онлайн-видеоуроки. Часть привлекательности игры — надежная поддержка онлайн-сообщества.
Насилие и страх
Ракеты могут взорваться, в результате чего исчезнут астронавты, не являющиеся людьми, но смерть не показана.
ЯзыкКонсьюмеризм
Продольная и параллельная компоновка. Несъедобная спаржа.
Поговорим о строении ракеты. Существуют два основных способа соединения ступеней — неправильный и армейский.
(I) Продольно — когда каждая ступень расположена за предыдущей. В реальности так, например, строится «Дельта IV» (та, которая НЕ heavy).
(II) Параллельно или пакетно — когда следующие (считаем сверху-вниз, помните?) ступени навешиваются сбоку, и в работу одновременно могут включаться все двигатели сразу нескольких ступеней. Примером может служить любая из огромного семейства «семёрок», хоть тот же Союз.
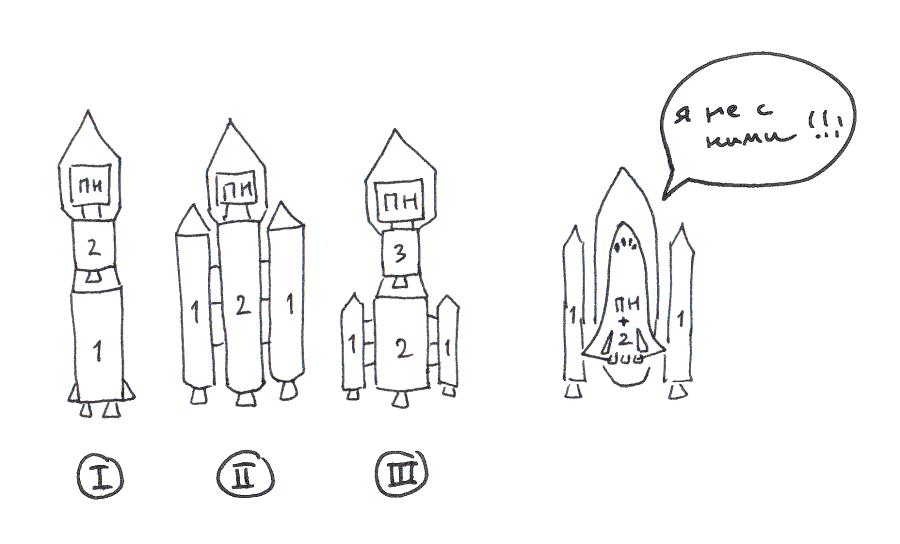
(1-2-3 — очередность отстрела ступеней)
У каждой компоновки есть свои плюсы и минусы:
Range calculation
Individual vessels do not have a fixed maximum range: whether a connection is possible between two vessels that are a given distance apart depends on the transmission strength of the vessels at both ends of the connection. Each antenna has a «power rating», measured as a unitless number, which contributes to the overall power rating of the vessel it is attached to. A connection can be established between two vessels when the geometric mean of their power ratings is greater than their separation as measured in meters.
This is calculated as follows:
Range=Vessel1×Vessel2{\displaystyle Range={\sqrt {Vessel_{1}\times Vessel_{2}}}}
Where:
- Range{\displaystyle Range} is the maximum distance in meters at which two vessels can connect with each other.
- Vessel1{\displaystyle Vessel_{1}} and Vessel2{\displaystyle Vessel_{2}} are the power ratings for the vessels that are attempting to connect to each other.
Power ratings for antennae range from 5k for the integrated antenna available in every Command module, to 100G for the largest dishes. Kerbin’s Deep Space Network can be treated as a vessel with a rating of 2G/50G/250G (depending on the level of the Tracking Station) for the purposes of calculating range.
If (by difficulty setting) there is only one tracking station, a ship must depend on a CommNet relay manally placed around Kerbin, here are the general ranges between antennae.
| 5k | 500k | 5M | 2G | 10G | 15G | 100G | |
|---|---|---|---|---|---|---|---|
| 5k | 5km | ||||||
| 500k | 50km | 500km | |||||
| 5M | 158.1km | 1.6Mm | 5Mm | ||||
| 2G | 3.2Mm | 31.6Mm | 100Mm | 2Gm | |||
| 10G | 7.1Mm | 70.7Mm | 223.6Mm | 4.5Gm | 10Gm | ||
| 15G | 8.7Mm | 86.6Mm | 273.9Mm | 5.5Gm | 12.2Gm | 15Gm | |
| 100G | 22.4Mm | 223.6Mm | 707.1Mm | 14.1Gm | 31.6Gm | 38.7Gm | 100Gm |
Combining antennae
When a craft has multiple, combinable antennae, the antenna’s power ratings stack in a way that provides diminishing returns using the following formula:
Vessel Power=Strongest Antenna Power×(Sum of Antenna PowersStrongest Antenna Power)Average Combinability Exponent{\displaystyle {\text{Vessel Power}}={\text{Strongest Antenna Power}}\times \left({\tfrac {\text{Sum of Antenna Powers}}{\text{Strongest Antenna Power}}}\right)^{\text{Average Combinability Exponent}}}
The vessel’s Average Combinability Exponent is the average of the combinability exponent values of all antennas on the vessel, where each antenna is weighted proportionally to its respective power rating. Note that all antennae and relays have a combinability exponent value of 0.75 except for the Communotron 16 and the Communotron 16S, with values of 1.0 and 0.0 respectively. This means that the Average Combinability Exponent will always be 0.75 for a vessel containing neither of these antennae. For vessels with a Communotron 16 or 16S, the Average Combinability Exponent is calculated:
Average Combinability Exponent=P1C1+P2C2+⋯+PnCnP1+P2+⋯+Pn{\displaystyle {\text{Average Combinability Exponent}}={\frac {P_{1}C_{1}+P_{2}C_{2}+\cdots +P_{n}C_{n}}{P_{1}+P_{2}+\cdots +P_{n}}}}
Where:
- {P1,P2,…,Pn}{\displaystyle \{P_{1},P_{2},\dots ,P_{n}\}} are the power ratings of each antenna.
- {C1,C2,…,Cn}{\displaystyle \{C_{1},C_{2},\dots ,C_{n}\}} are the combinability values of each respective antenna.
For example, a vessel with a Communotron 88-88 (100G power, 0.75 combinability) and also a Communotron 16 (500k power, 1.00 combinability) would have the following as its Average Combinability Exponent:
(100×109)×0.75+(500×103)×1.00(100×109)+(500×103)=0.75000125{\displaystyle {\frac {(100\times 10^{9})\times 0.75+(500\times 10^{3})\times 1.00}{(100\times 10^{9})+(500\times 10^{3})}}=0.75000125}
Antennae combinability exponent values can be found under «antennaCombinableExponent» in the part configuration files. If the value is missing, the default value of 0.75 is used.
Обтекатели, нужны или нет?
Обтекатель нужен, если потери от аэродинамического сопротивления больше, чем от дополнительной массы.
Если ваша полезная нагрузка больше похожа на ежа-мутанта, замотанного скотчем — даже не думайте, сразу прячьте эту хрень под обтекатель, а то стыдно. А одинокая капсула с парашютом отлично будет чувствовать себя и без оболочки. И да, если уж обтекатель используется — делайте его длинным и острым, это максимально уменьшит сопротивление.

Чем менее аэродинамична наша полезная нагрузка, тем позже стоит сбрасывать обтекатель. Но уже выше ≈30 километров он в любом случае становится лишним грузом.
Месторасположение
Двигатели RCS могут быть расположены где угодно на аппарате. В отличие от воздушно-реактивных двигателей и ЖРД, они не нуждаются в размещении на баках RCS или прокладывании топливной линии для них. Блок двигателей RCS может обеспечить полное управление вращением, тогда как один двигатель может обеспечить тягу только в одном направлении. Желательно разместить двигатели RCS максимально далеко от центра масс, таким образом максимизируя вращающий момент (силу вращения) ими генерируемый.
Обычно самым практичным является размещение их с четырехсторонней симметрией, поскольку это может обеспечить лучшее управление. В теории можно обеспечить подходящее управление креном, тангажом и рысканием всего с одним набором блока двигателей с четырехсторонней симметрией. Проведение маневров, однако, намного проще, когда двигатели для одного направления равномерно распределены с обеих сторон центра масс, таким образом, они не создают вращающий момент. Это обычно создается при помощи одного набора вверху и другого — у основания ракеты. Система Автоматической Стабилизации может заглушить неумышленные изменения направления в процессе движения.
Остерегайтесь, они будут полностью повреждены, если они заденут поверхность.
Signal strength
The length of a communication link relative to its maximum range is represented by signal strength. Signal strength for a single-hop link starts at 100% at a distance of zero and decreases as distance increases, down to a signal strength of 0% at the maximum range of the link. The relationship is non-linear: the true value requires plotting the relative distance on a Bezier curve with the keys ‘0 0 0 0’ and ‘1 1 0 0’. This can be calculated as follows:
- Calculate the relative distance between the vessels (the result should be between 0.0 and 1.0): 1−Distance From Link PointMaximum Range{\displaystyle 1-{\frac {\text{Distance From Link Point}}{\text{Maximum Range}}}}
- Substitute the result above into the Bezier curve equation (cubic derivation): −2×3+3×2{\displaystyle -2x^{3}+3x^{2}} or (3−2x)x2{\displaystyle (3-2x)x^{2}}
The result is the signal strength of the link at the specified distance. Note that the above applies to a single-hop link: if the signal is being bounced through one or more relays, the signal strength is the product of the signal strengths of each link making up the path to the control point.
Example
Calculating the Signal Strength between a Level 3 DSN Tracking Center and a probe around Jool at a distance of 73.4Gm from Kerbin with two Communotron 88-88 antennas:
Max Power of Lvl 3 DSN connection: 250000000000{\displaystyle 250\,000\,000\,000}
Max Power of Probe: 100000000000×(200000000000100000000000)0.75=168179283051{\displaystyle 100\,000\,000\,000\times \left({\frac {200\,000\,000\,000}{100\,000\,000\,000}}\right)^{0.75}=168\,179\,283\,051}
Max Range of Connection: (2.5×1011)×(1.68×1011)=205048337625m{\displaystyle {\sqrt {(2.5\times 10^{11})\times (1.68\times 10^{11})}}=205\,048\,337\,625{\text{m}}}
Relative distance between Link Points: 1−73.4205=0.642{\displaystyle 1-{\frac {73.4}{205}}=0.642}
Signal Strength: (3−2×0.642)×0.6422=0.707=71%{\displaystyle (3-2\times 0.642)\times 0.642^{2}=0.707=71\%}
Therefore the signal strength for this connection would be 71%.
Science Transmission
If CommNet is enabled in the difficulty settings, then transmitting science through a connection with high signal strength will give a bonus the transmission efficiency of up to 40% (to a maximum of 100% value). This bonus decreases non-linearly with signal strength. For example, a Gravity Scan from low Jool orbit would give 90*0.4=35 Science if transmitted with CommNet disabled or over a marginal connection, but if transmitted through a connection with an overall strength of 100% would give 90*0.4*1.4=50.4 Science.
Орбиты в файлах сохранений
Файлы сохранений (и сценарии) в Kerbal Space Program — это просто текст и пригоден для чтения информации об орбите каждого аппарата, созданного на данный момент в игре. Большинство текстовых редакторов позволяют искать с помощью ^ Ctrl+F (⌘Cmnd+F для «Mac»). Это помогает быстро найти в файле данные по аппарату. Секция описания орбиты в файле «persistent.sfs» должна выглядеть примерно так:
ORBIT
{
SMA = 76875.4600066045
ECC = 0.136808532664149
INC = 32.6082297441138
LPE = 91.4665699628126
LAN = 305.802690796769
MNA = 0.556028537338098
EPH = 19189976.1161395
REF = 3
OBJ = 0
}
Каждая из этих строчек имеет значение и, изменив их (а потом перезагрузив сохранение), вы измените орбиту космического корабля.
- SMA : – большая полуось — среднее между апоцентром и перицентром, отсчитываемых от цента тела.
- ECC : – эксцентриситет — форма орбиты, её «вытянутость».
- INC : – наклонение — наклон орбиты по отношению к плоскости экватора.
- LPE : Longitude of – долгота перицентра — горизонтальная ориентация перицентра.
- LAN : Longitude of the – долгота восходящего узла — горизонтальная ориентация восходящего узла.
- MNA : Mean anomaly at epoch – средняя аномалия — определяет позицию аппарата вдоль эллипса в определенное время.
- EPH : epoch – привязка по времени для орбиты.
- REF : reference body – код тела — ID тела, вокруг которого вращается аппарат. 0 это солнце, 1 это Кербин,2 это Мун, 3 это Минмус.
- OBJ : тип объекта. Похоже, 0 — зонд (англ. «probe»), 1 – отделяющаяся часть(англ. «debris»).
Для отделения дробной части от целой используется «.» (точка), ноль обозначается как «0», а не «0.0» (например, SMA = 0).
Изменяя эти величины в файле сохранения, можно переместить корабль на любую позицию. Очень полезно для сценариев.
Идентификаторы (ID) небесных тел
Таблица содержит Идентификаторы (ID) всех небесных тел в Кербольской системе:
| Планеты/Звезды | Луны | ||
|---|---|---|---|
| Идентификатор (ID) | Название | Идентификатор (ID) | Название |
| Кербол | |||
| 4 | Мохо | ||
| 5 | Ив | 13 | Гилли |
| 1 | Кербин | 2 | Мун |
| 3 | Минмус | ||
| 6 | Дюна | 7 | Айк |
| 15 | Дрес | ||
| 8 | Джул | 9 | Лейт |
| 10 | Валл | ||
| 12 | Тило | ||
| 11 | Боп | ||
| 14 | Пол | ||
| 16 | Иилу |
Шаг 4 — Посадка на Муну
Выберете место посадки вдоль орбитальной траектории корабля. Если вы хотите оставить Кербин видимым из вашего места посадки, выбирайте место вдоль траектории на «видимой стороне» Муны. Подождите, пока вы почти пролетите над ним.
Как только вы будете над ним, уменьшайте горизонтальную скорость до тех пор, пока желтый маркер не будет наверху навигационого шара.
Отсоедините любые ступени от посадочного модуля, если вы до сих пор не сделали это.
Начните медленный вертикальный спуск. Не наклоняйте ваш посадочный модуль!!! Следите за жёлтым кругом с Х в нём на навигационном шаре, и старайтесь его придерживаться.
На 50 000 м начните снижение скорости. Она должна быть не выше, чем 300-400 м/с в этой точке. Когда достигнете 10 000 м, уменьшите вашу скорость ниже 100 м/с.
На 2 000 м высоты, вы должны уменьшить скорость спуска до финальной в 6-12 м/с. На скорости свыше вы рискуете повредить посадочный модуль (и оставить вашего бравого космонавта на Муне). Опустите посадочные опоры, если вы этого еще не сделали.
Если вы уверены в ваших умениях посадки, цельтесь на плоскую поверхность для уменьшения осложнений на протяжении посадки/взлёта. Обычно, лучшие всего искать места посадки либо на вершине холма, либо во впадине кратера.
Нежно прикоснитесь на 6 м/с с настолько малой горизонтальной скорость, насколько это возможно.
Поздравления! В только что совершили посадку на Муну. Выведите Кербала(ов) наружу из жилых модулей размять ноги, полетать вокруг, и разместить флаг!

Посадочный модуль C4N
Управление роверами
По-умолчанию, планетоход управляется при помощи клавиш A, D, W и S. К сожалению, эти клавиши также управляют вращением транспортного средства, что может сделать планетоход абсолютно не поддающимся управлению на планетах с низкой силой тяжести. В качестве решения этой проблемы, клавиши управления планетоходом могут быть переназначены на другие клавиши в меню настройки параметров. Если доступна цифровая клавиатура, хорошее решение состоит в том, чтобы сопоставить клавишам управления движением A, D, W и S клавиши 8, 4, 5 и 6 на цифровой клавиатуре. Другое решение состоит в том, чтобы переключаться в режим стыковки при управлении планетоходом.
Управление стыковкой в режиме «LIN».
При использовании управление стыковкой вместо управления ступенью, существует возможность быстрого переключения, при помощи клавиш управления между передвижением и вращением. Когда управление включено в режиме «ROT», то клавиши A, D, W и S поворачивают планетоход, на который можно переключиться с помощью клавиши space. В режиме «LIN» the клавиши I, J, K и L — поворачивают, а A, D, W и S — перемещают, что обычно безопасно для планетохода. При помощи одного нажатия клавиши space, управление креном может быть легко включено и выключено, и, следовательно, задан устойчивый режим изменения ускорения/направления и быстрый способ управления креном планетохода на планетах с низкой силой тяжести, что может опрокинуть или скатить его с холма.
Для препятствия скатыванию планетоходов при их остановке, нужно применять стояночный тормоз (в центре в верхней части экрана, нижний значок справа) перед остановкой. При управлении планетоходом, нажатием клавиши B (по-умолчанию) можно включить тормоз, но после того, как вы отпустите клавишу, тормоз тоже будет снят.
Самая легко ломающаяся деталь планетохода — шасси. При испытании ими сильных нагрузок, они могут стать «сломанными» (англ. «broken»). В таком состоянии они все еще не повреждены как деталь, но не работают больше в качестве шасси. Усилие, необходимое для создания такой ситуации намного ниже, чем предел прочности, указанный в меню деталей. Шасси легко ломаются при прыжках планетохода, так что рекомендуется уменьшать скорость при движении планетохода по холмистой местности. Они также ломаются при превышении ими максимальной скорости шасси, что может легко случиться при движении вниз по склону или при использовании ракетных двигателей разгона планетохода до большей скорости, чем он может набрать при использовании одних лишь шасси. Но также существует возможность увеличения скорости до значения, на котором шасси сломаются, при помощи снижения веса, воздействующего на шасси, например, в атмосфере — при использовании крыльев.
К счастью, сломанные колеса можно чинить при помощи кербанавтов, находящихся на работе вне аппарата. Когда кербанавт подойдет близко к поврежденному колесу, щелкните правой кнопкой мыши по нему и нажмите на «Починить шасси» (англ. «Repair Wheel»). Колесо немедленно снова станет готово к эксплуатации. Обычно, при этом колесо немного подскакивает, что может повредить планетоход, особенно если он движется или очень легок.
Перечень командных модулей
Существует двадцать различных командных модулей в игре. Две капсулы для ракет, пять кабин для аэропланов и космопланов, два модуля для спуска на безатмосферные планеты, обзорный купол для станций или баз, восемь зондов для беспилотных кораблей, шасси для наземного дрона и внешнее кресло для планетоходов. Основное отличие между различными командными модулями — это их внешняя форма, масса и возможное количество экипажа. Исключение составляет внешнее командное кресло «EAS-1», которому нельзя назначить экипаж при запуске, в котором нет хранилища для научных данных и которое не может быть корневой деталью корабля.
Несмотря на наличие мест для экипажа, хранилище для попутчиков «PPD-10», отсек экипажа Mk1, отсек экипажа MK2, пассажирский отсек Mk3 и мобильная лаборатория MPL-LG-2 не предназначены для управления кораблём.
| Вид | Название | Размер | Цена() | Масса(т) | Макс.температура(K) | Прочность(м/с) | Прочность(м/с) | Вращающиймомент SAS(кН · м) | Пилот/УровеньSAS | Экипаж/расход | Ресурсы |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Кабина Mk1 | Маленький | 1 250(1 241) | 1,28(1,25) | 2 000(1 100) | 40 | 50 | 10 | 50 7,5 MP | |||
| Интегрированная кабина Mk1 | Маленький | 1 600(1 591) | 1,03(1,00) | 2 000(1 100) | 40 | 50 | 10 | 50 7,5 MP | |||
| Кабина Mk2 | Mk2 | 3 500(3 482) | 2,06(2,00) | 2 500(1 400) | 45 | 50 | 15 | + | 150 15 MP | ||
| Интегрированная кабина Mk2 | Mk2 | 3 500(3 470) | 2,10(2,00) | 2 500(1 400) | 45 | 50 | 15 | + | 150 25 MP | ||
| Кабина Mk3 | Mk3, Маленький | 10 000(9 880) | 3,90(3,50) | 2 700(1 500) | 50 | 50 | 40/40/20 | + | 500 100 MP | ||
| Командный отсек Mk1 | Маленький, Крошечный | 600(588) | 0,84(0,80) | 2 200(1 200) | 14 | 50 | 5 | 50 10 MP | |||
| Командный отсек Mk1-3 | Большой, Маленький | 3 800(3 764) | 2,72(2,60) | 2 400(1 400) | 45 | 50 | 15 | + | 150 30 MP | ||
| Посадочный модуль Mk1 | Маленький | 1 500(1 482) | 0,66(0,60) | 2 000(1 000) | 8 | 50 | 3 | 50 15 MP | |||
| Посадочный модуль Mk2 | Большой | 3 250(3 202) | 1,515(1,355) | 2 000(1 200) | 8 | 50 | 15 | + | 100 40 MP | ||
| Модуль PPD-12 «Купол» | Большой, Маленький | 3 200(3 188) | 1,80(1,76) | 2 000(1 000) | 8 | 50 | 9 | 200 10 MP | |||
| Внешнее командное кресло EAS-1 | Установленный радиально | 200 | 0,05 | 1 200 | 6 | 50 | — | — | |||
| Горизонд «Скиталец» | Маленький | 800 | 0,15 | 1 200 | 12 | 50 | — | 2,4 /мин(144 /ч) | 120 | ||
| Горизонд КУБ | Крошечный | 360 | 0,07 | 1 200 | 15 | 50 | — | 1,5 /мин(90 /ч) | 5 | ||
| Горизонд ГЕКС | Крошечный | 650 | 0,1 | 1 200 | 12 | 50 | 0,5 | 1 | 1,5 /мин(90 /ч) | 10 | |
| Горизонд ОКТО | Крошечный | 450 | 0,1 | 1 200 | 12 | 50 | 0,3 | 1,2 /мин(72 /ч) | 10 | ||
| Горизонд ОКТО2 | Крошечный | 1 480 | 0,04 | 1 200 | 12 | 50 | — | 2 | 1,8 /мин(108 /ч) | 5 | |
| Горизонд «Сухопутник» | Крошечный | 300 | 0,05 | 1 800 | 12 | 50 | — | — | 1,67 /мин(100 /ч) | 10 | |
| Горизонд ГЕКС2 | Маленький | 7 500 | 0,2 | 2 000 | 8 | 50 | 10 | 3 | 3,0 /мин(180 /ч) | 1 000 | |
| Блок удалённого управления RC-001S | Маленький | 2 250 | 0,1 | 2 000 | 9 | 50 | 0,5 | 3 | 3,0 /мин(180 /ч) | 15 | |
| Блок удалённого управления RC-L01 | Большой | 3 400 | 0,5 | 2 000 | 9 | 50 | 1,5 | 3 | 4,8 /мин(288 /ч) | 30 | |
| Блок управления дрона MK2 | Mk2 | 2 700 | 0,2 | 2 500 | 20 | 50 | 15/3/3 | 3 | 3,0 /мин(180 /ч) | 250 | |
| Зонд ОСМ | Маленький | 9 900(9 854) | 0,895(0,395) | 2 200 | 9 | 50 | 6 | 3 | 3,0 /мин(180 /ч) | 1 000 45 LF55 O | |
| Ступень ТММ | Маленький | 21 500(6 300) | 0,795(0,415) | 2 200 | 12 | 50 | 12 | 2 | 1,8 /мин(108 /ч) | 4 000 3 800 XE |
↑ Момент разный для разных осей — тангаж/рыскание/крен
Использование
Улучшенный модуль захвата в раскрытом состоянии.
УМЗ — основное средство захвата и перенаправления астероидов. Он также полезен для стыковки аппарата-к-аппарату или для обмена ресурсами с аппаратом или отделяющейся частью без стыковочного узла. Также как и со стыковочными узлами, ресурсами (жидкое топливо, электричество и т.д.) можно обмениваться с целью. И объекты, соединенные когтями, управляются вместе как единый объект. Это похоже на стыковочный узел, но без сложности выравнивания со стыковочным узлом цели. Кербал, захваченный при помощи УМЗ, станет подобным тряпичной кукле и может быть перенесен на борту аппарата.
Управление УМЗ — простое. Его состояние переключается между «вооружен» (англ. «Armed») или «разоружен» (англ. «Disarmed»). В то время как он «разоружен», он ведет себя подобно любой другой детали. После переключения состояния на «вооружен», приблизьтесь перпендикулярно целевой поверхности со скоростью не более нескольких м/с, и раскрытый коготь автоматически захватит что-нибудь, с чем он столкнется (или что-нибудь столкнется с ним), пристыковывая цель к текущему аппарату. Для расстыковки от цели, щелкните правой кнопкой мыши по УМЗ и выбирите «Освободить» (англ. «Release»).
Как только УМЗ присоединен, вращение его когтей может быть переключено. Вращение заблокировано каждый раз, когда «вооружен» и не присоединен, но может быть разблокировано правым щелчком мыши по УМЗ и выбором «Свободное вращение» (англ. «Free Pivot»).
Когда вращение свободно, маховики или Система ориентации могут использоваться для изменения тангажа и рыскания аппарата (относительно положения УМЗ) относительно цели, но не крена; когти вращаются, а не поворачиваются
Это жизненно важно при соединении с астероидами, поскольку двигатель должен быть нацелен непосредственно на центр массы, чтобы управлять астероидом при его перемещении
Обратите внимание на то, что средства управления могут чувствовать себя противоположными; будет перемещаться противоположный конец аппарата от когтя. Отметьте также, что диапазон движения, которое обеспечивает вращение, ограничен окружностью, подобно самому УМЗ, по существу представляя собой коническую область.
После выравнивания аппарата команда «Блокировка вращения» (англ
«Lock Pivot») может использоваться для фиксирования ориентации аппарата относительно захваченной цели. Обратите внимание, что, даже при блокировке, при достаточной поперечной силе центр может отклониться, хотя, как только действие силы прекратиться, он отклонится обратно к своей ранее заблокированной ориентации. Также возможно с помощью ранее созданных групп действий “разоружить” УМЗ в процессе присоединения, не отпуская его − просто визуальный эффект.
Ошибки, влияющие на изделие
Сразу после прикрепления.
Существует возможность получения небольшого сбоя от игры при соединении с «когтем» таким образом, чтобы он был на не активном космическом корабле. Кербин исчезает сразу после подключения «когтей» и повреждения физики, поскольку аппарат начинает падать даже на орбите. Существует вероятность, что это просто исчезает ландшафт, если своевременно переключиться на другой аппарат. «Danny2462» сделал ролик об этой ошибке, в котором он использовал два «когтя» на одном кербале, находящемся в активном «когте», но кербал и «коготь» на активном аппарате вовсе не обязательны.
Чтобы избежать такого поведения, игрок должен переключиться на аппарат с «когтем» перед соединением.
Этапы
Этап 1 — Постройка
Для полета на Иилу вам необходим посадочный модуль похожий на «Аполлон». Короче говоря, для облегчения запуска, сборка проходит на орбите.
Трансфер до места и длинная дорога домой
1: Во-первых, горючее. вам потребуется несколько Rockomax X200-32 Fuel Tank или же один Rockomax Jumbo-64 Fuel Tank, но зато какой!!!
2: Двигатели — тут выбор не большой. Выбирая между эффективностью и мощностью самый лучший вариант — LV-N Atomic Rocket Motor…Вообще это работает для всех межпланетных перелетов.
3: Не забудьте док!
4: Ну и кончено RCS. Не будет же кербонавт сам толкать капсулу? (Прим. переводчика: лично я ставил RCS только на посадочном модуле. На двигательной части имеет смысл оставить лишь баки чтобы восполнить потери после первой стыковки на орбите)
Посадочный модуль
1: Если вы хотите сделать управляемый модуль — то вам нужно «чуть больше» топлива для второй стыковки и возвращения домой. Как пример, можно взять Rockomax X200-16 Fuel Tank, а если будут остатки — то вам же лучше, дельта лишней не бывает. Ну а если вы дроно-вод, то можете не раскошеливаться на тяжелые баки, а попробовать что-нибудь более легкое.
2: Так же помним про ноги (садить на движки — а-та-та!). Ручное пилотирование = LT-2 Landing Strut; Беспилотник = LT-5 Micro Landing Strut
3: Естественно посадочные двигатели (Достаточно «пуделя», он же и выведет на орбиту при необходимости).
4: RCS! Снова! Но уже обязательно! (Док-порт тоже необходим, для особого эстетизма можно взять укрепленный)
5: Если же вы прочитали это и почти достроили модуль, то закрепите пару парашютов. На всякий случай. Вдруг кербонавтам повезет и они вернутся домой.
Если вы не хотите возвращать домой эту конструкцию, можете смело пропускать пункт с посадочным модулем. а для приземления (если необходимо) используйте трансферный модуль.
Этап 4 — Полет от Кербина к Иилу
Теперь вы можете с чистой совестью давать полный газ на свои LV-N Atomic Rocket Motor в точке перикерба. Неплохо ставить маневровый узел чтобы определить точное количество дельты для полета к Иилу. Лишняя экономия не повредит.
Если вы все сделали правильно то уйдя с орбиты Кербина ваш корабль рано или поздно (а точнее в первом же витке) попадет в зону влияния Иилу и будет захвачен планетой. Будьте внимательны с торможением.
Если вы перелетели, всего лишь дайте задний ход и вернетесь на вашу траекторию.
Этап 5 — Прибытие на Иилу
Когда вы долетите до Иилу сбавьте скорость до обычной круговой орбиты.
Сделав это однажды, в следующий раз вы сможете лично для себя определить как лучше тратить горючее. Если вы хотите вернутся назад — будьте экономней.
Этап 7 — Возвращение (необязательно)
Дорога домой почти идентична полету к Иилу. Выйдите на орбиту, в перицентре увеличьте скорость, войдите в зону влияния Кербина и приземлитесь.
Теория
Модули САС используют систему P.I.D., которая означает «Пропорциональная, интегральная, производная» (англ. “Proportional, Integral, Derivative”). Система PID применяется к угловой скорости аппарата, не к курсовой.
Пропорциональная (англ. «Proportional») означает, что модуль САС применяет силу вращения, которая пропорциональна скорости вращения. Другими словами, чем быстрее вращается аппарат, тем тяжелее модуль пытается скорректировать вращение.
Интегральная (англ. «Integral») означает, что модуль САС увеличивает корректирующую силу дольше, чем указывает летательный аппарат. Так как интеграл скорости — указан, он корректирует направление аппарата (угол — интеграл угловой скорости). Так как суммированное интегральное значение обнуленяется при включении САС, управление пытается вернуть направление аппарата к тому, которое было до включения САС.
Производная (англ
«Derivative») означает, что модуль САС принимает угловое ускорение аппарата во внимание и пытается применить усилие против него. Таким образом, чем быстрее аппарат движется «во» вращении, тем тяжелее модуль САС пытается его остановить
Это, как предполагается, амортизирует воздействие модуля САС и предотвращает проскакивание, а также амортизирует любое ускорение поворота или крена.
Управление PID применяется к скорости вращения аппарата в точке управления. Это означает, что большие ракеты имеют тенденцию к колебанию управления во время полета, это делается потому, что САС видит подсказку (обычно где командный модуль) вращения и предполагает, что все судно вращается также быстро. По этой причине, «колебания» могут быть, в основном, устранены, при управлении аппаратом максимально близко к центру масс. Этого можно достичь, разместив командный модуль или стыковочный узел в центре ракеты. Щелкните правой клавишей мыши по модулю и нажмите «Управлять отсюда» (англ. «Control From Here») для смены точки управления. Если Вы закончили управлением «мертвым» концом ракеты после разделения ступеней, просто нажмите клавишу или для выбора подходящей ступени.
Создание планетоходов
Основы
Для того, чтобы транспортное средство было определено как планетоход, он должен содержать по крайней мере один командный модуль и несколько колес. В качестве источника электроэнергии строго не рекомендуется использовать командный модуль, так как его внутренней энергии хватит чуть больше, чем на несколько минут езды. Для возможности прямого движения, колеса транспортного средства должны быть установлены параллельно друг другу в ЦВС. Во время управления планетоходом, колеса достаточно умны для движения в направлении, соответствующем клавишам управления.
Для работы шасси требуется большое количество электроэнергии, так что планетоход должен содержать в себе приличное количество энергии. Батареи могут временно обеспечить планетоход энергией, но стабильные источники энергии в виде солнечных панелей или Радиоизотопного термоэлектрического генератора «PB-NUK» также необходимы для постоянного функционирования планетохода. Часто солнечные панели предпочтительней из-за своей низкой массы, но выдвижные солнечные панели могут быть легко уничтожены аэродинамическим сопротивлением при быстрой езде планетохода в атмосфере.
При присоединении радиально к плоскому корпусу, такому как «Модель «RoveMate» от «Probodobodyne», множества встраиваемых шасси, важно отключить «угловую симметрию» (англ. «angle snap») в меню сборки
Иначе, ни в одной точке планетохода, кроме точного центра, шасси не присоединится как положено и всегда будет располагаться под углом к конструкции.
Шасси для планетоходов: модели «3», «1» и «2» с кербалом для сравнения размеров.
| Вид | Название | Размер | Цена() | Масса(т) | Макс.температура(K) | Прочность(м/с) | Прочность(м/с) | Энергопотребление(/с) | Максимальнаяскоростьэлектродвигателя(м/с) | Тормозной момент(кНм) |
|---|---|---|---|---|---|---|---|---|---|---|
| Колесо «Движ-S2» | Установленный радиально | 300 | 0,05 | 1 200 | 20 | 20 | 1,0 | 12 | 0,34 | |
| Колесо «Движ-M1» | Установленный радиально | 450 | 0,075 | 1 200 | 50 | 50 | 2,5 | 34 | 2 | |
| Усиленное колесо TR-2L | Установленный радиально | 760 | 0,105 | 1 200 | 100 | 80 | 3,5 | 58 | 3 | |
| Колесо «Движ-XL3» | Установленный радиально | 1 200 | 1,25 | 1 200 | 150 | 200 | 5,0 | 15,5 | 30 |
Особенности
Для стабильности и легкости в управлении, планетоход должен быть относительно широким с низким расположением центра масс. Что делает его намного устойчивее для планетохода от опрокидывания при ускорении, торможении или повороте на скорости. Планетоходы становятся менее устойчивыми при уменьшении силы тяжести, таким образом, планетоход, который является абсолютно устойчивым при управлении вокруг Космического Центра Кербина может легко перевернуться на Минмусе, например. Другая опасность тел с низкой силой тяжести, подобных Минмусу состоит в том, что планетоходы с малой массой не могут обеспечить достаточное давление на свои шасси для сцепления с поверхностью и ускорения. Одно из решений этой проблемы состоит в том, чтобы использовать направленные вверх двигатели Системы ориентации для того, чтобы прижать планетоход к поверхности.
Либо, вместо этого, чтобы пытаться избежать полного переворота, планетоход может быть спроектирован для самостоятельного исправления. На маленьких планетоходах выдвигающиеся Посадочные опоры «LT-1» могут использоваться для переворота их обратно, если перевернутся вверх тормашками. Большие планетоходы в мирах с низкой силой тяжести могут помочь себе встать при помощи двигателей Системы ориентации. Планетоходы могут также переворачивать себя с помощью момента вращения от маховиков или своего командного модуля.
Наиболее сложные планетоходы — практически маленькие космические корабли, использующие ракетные двигатели для ухода с орбиты и самостоятельной посадки или даже самостоятельного возврата на орбиту и перевозящие множество кербанавтов или другие большие полезные нагрузки.
Effects of signal loss
Depending on your difficulty settings, several effects occur when the CommNet signal is lost, either from the KSC or a probe control point. This could be due to either electricty loss, out of CommNet range, or an antenna destruction. There is also a setting where you can force the signal to blackout when entering a body’s atmosphere too fast.
Manned without a pilot: You will lose the ability to create maneuver nodes, or delete existing ones
Probe, require control unchecked: Your probe will lose three capabilities : rotation control (roll, yaw, pitch), precise thrust control (only 0 or maximum), and the ability to create or remove maneuver nodes. If your probe is capable of locking a maneuver axis through SAS, it is advised to create a maneuver node before transmission blackout (passing behind a body) to allow the ship to perform the maneuver.
Probe, require control checked: You will completely lose control of your probe. Either wait for it to go back to a CommNet range, or send a ship with a probe control point capability to do general maneuvers (deploy solar panels, precise control,…).
SAS isn’t transmitted by the KSC or a probe control point. If you cannot SAS, either look if your probe is controllable (batteries, CommNet range) or has a pilot onboard. The level of SAS depends on the ship itself (probe SAS levels or pilot level).